Project 3: Celestial Dynamics — N-Body Gravitational Simulation
Tip. Every highlighted link in this page is clickable. For fast navagation use Table of Contents
Author: Nels Buhrley
Language: C++17 · Python 3 (visualization)
Build: make — see Build & Run
Snapshot
- Implemented an N-body gravitational simulator in C++17 with multiple integrators (RK4, Euler-Cromer, Stormer-Verlet) for accuracy/energy-conservation tradeoff studies.
- Modeled realistic multi-body systems including full Solar System datasets in astronomical units.
- Built a Python rendering pipeline for 2D/3D orbit plots and animations to evaluate long-horizon trajectory behavior.
- Demonstrates competency in numerical integration, multi-body simulation, and validation through comparative methods.
For a fast technical check, jump to Numerical Methods and Build & Run.
Table of Contents
- Snapshot
- Overview
- Physics Background
- Numerical Methods
- Code Structure
- Results
- Sources of Error
- Build & Run
- Simulation Parameters
- Key Techniques
- Project Structure
Overview
This project implements an N-body gravitational simulation capable of evolving planetary systems, binary stars, and the full Solar System with moons. Three independent numerical integrators — 4th-order Runge-Kutta (RK4), Euler-Cromer, and Störmer-Verlet — are provided, allowing direct comparison of accuracy and energy conservation properties. The simulation uses astronomical units (AU, solar masses, years) and includes a complete built-in dataset for the Sun, all nine planets, and seven major moons.
A rich Python visualization pipeline generates both 2D and 3D static orbit plots and animated orbit videos with configurable trail effects.
Physics Background
Newton’s Law of Gravitation
Each body $i$ of mass $m_i$ at position $\vec{r}_i$ experiences a gravitational acceleration due to all other bodies:
\[\ddot{\vec{r}}_i = \sum_{j \neq i} \frac{G m_j (\vec{r}_j - \vec{r}_i)}{|\vec{r}_j - \vec{r}_i|^3}\]where $G$ is Newton’s gravitational constant. In computational units of AU, solar masses, and years:
\[G = 4\pi^2 \;\text{AU}^3 \;\text{M}_\odot^{-1} \;\text{yr}^{-2}\]This choice of units simplifies the arithmetic: Earth orbits the Sun at ~1 AU with period ~1 year, and the gravitational constant is a small integer multiple of $\pi^2$.
Conservation Laws
An isolated N-body system conserves:
- Total energy $E = T + V$ (kinetic + gravitational potential)
- Total momentum $\vec{P} = \sum_i m_i \vec{v}_i$
- Total angular momentum $\vec{L} = \sum_i m_i (\vec{r}_i \times \vec{v}_i)$
Symplectic integrators (Euler-Cromer, Verlet) preserve these quantities much better than non-symplectic methods (RK4) over long timescales. This makes integrator choice physically meaningful, not just a numerical preference.
Center-of-Mass Frame
When bodies are added to a CelestialSystem, the code automatically translates positions and velocities so that the center of mass is at rest at the origin:
This prevents the entire system from drifting and ensures that the simulation frame is inertial.
Numerical Methods
4th-Order Runge-Kutta (RK4)
The state vector $\vec{y} = (t, \vec{r}_1, \vec{v}_1, \vec{r}_2, \vec{v}_2, \ldots)$ is advanced via the classical four-stage formula:
\[\vec{y}_{n+1} = \vec{y}_n + \frac{h}{6}(\vec{k}_1 + 2\vec{k}_2 + 2\vec{k}_3 + \vec{k}_4)\]- Global error: $\mathcal{O}(h^4)$
- Symplectic: No — energy drifts secularly over long integrations
- Best for: Short, high-accuracy simulations where energy drift is acceptable
Euler-Cromer (Semi-Implicit Euler)
Updates velocities first using current accelerations, then positions using the new velocities:
\(\vec{v}_{n+1} = \vec{v}_n + \vec{a}_n \cdot h\) \(\vec{r}_{n+1} = \vec{r}_n + \vec{v}_{n+1} \cdot h\)
- Global error: $\mathcal{O}(h)$ — first-order accurate
- Symplectic: Yes — preserves phase-space volume
- Best for: Long-duration integrations (millions of years) where energy conservation matters more than step-by-step accuracy
Störmer-Verlet
A second-order symplectic method that uses only positions (no explicit velocities in the state):
\[\vec{r}_{n+1} = 2\vec{r}_n - \vec{r}_{n-1} + \vec{a}_n \cdot h^2\]- Global error: $\mathcal{O}(h^2)$
- Symplectic: Yes — excellent long-term energy conservation
- Bootstrap: Requires $\vec{r}_{-1}$ to start. This is computed by a single backward RK4 step from the initial conditions via
initializeVerletPreviousState(), which builds a combined position-velocity state, steps backward by $-h$ using RK4, and extracts the resulting positions.
All three integrators are implemented as template functions in the integrator namespace, accepting generic state types and function objects for derivatives/accelerations.
Code Structure
All code is header-only (the src/ directory is empty):
| File | Role |
|---|---|
main.cpp |
Entry point — creates Run instance |
include/objects.h |
CelestialObject (mass, position, velocity, gravity) and CelestialSystem (N-body collection, force computation, state-vector conversion) |
include/processing.h |
integrator::rk4(), integrator::euler_chromer(), integrator::verlet(), integrator::initializeVerletPreviousState() |
include/run.h |
Interactive Run class: menus, Solar System data, simulation execution, CSV output |
plotting.py |
2D/3D static plots + animated orbit videos (729 lines) |
Built-In Solar System Data
The Run class contains hardcoded orbital elements for:
| Object | Mass (M☉) | Source |
|---|---|---|
| Sun | 1.0 | — |
| Mercury–Pluto | JPL values | 9 planets |
| Moon, Phobos, Deimos, Io, Europa, Ganymede, Callisto | JPL values | 7 moons |
Positions and velocities are specified in AU and AU/year at a common epoch, allowing the simulation to reproduce the actual Solar System dynamics.
Simulation Modes
The interactive menu offers three modes:
- Verification — Two-body orbits (Earth-Sun, Jupiter-Sun, binary stars) and three-body problems (Sun-Earth-Moon, Sun-Earth-Jupiter with adjustable Jupiter mass)
- Solar System — Full 16-body (or subset) simulation with user-chosen integrator, time step, and duration. Jupiter’s mass can be scaled to explore stability.
- Custom — User defines bodies interactively (name, mass, position, velocity)
Results
2D Orbit Plots
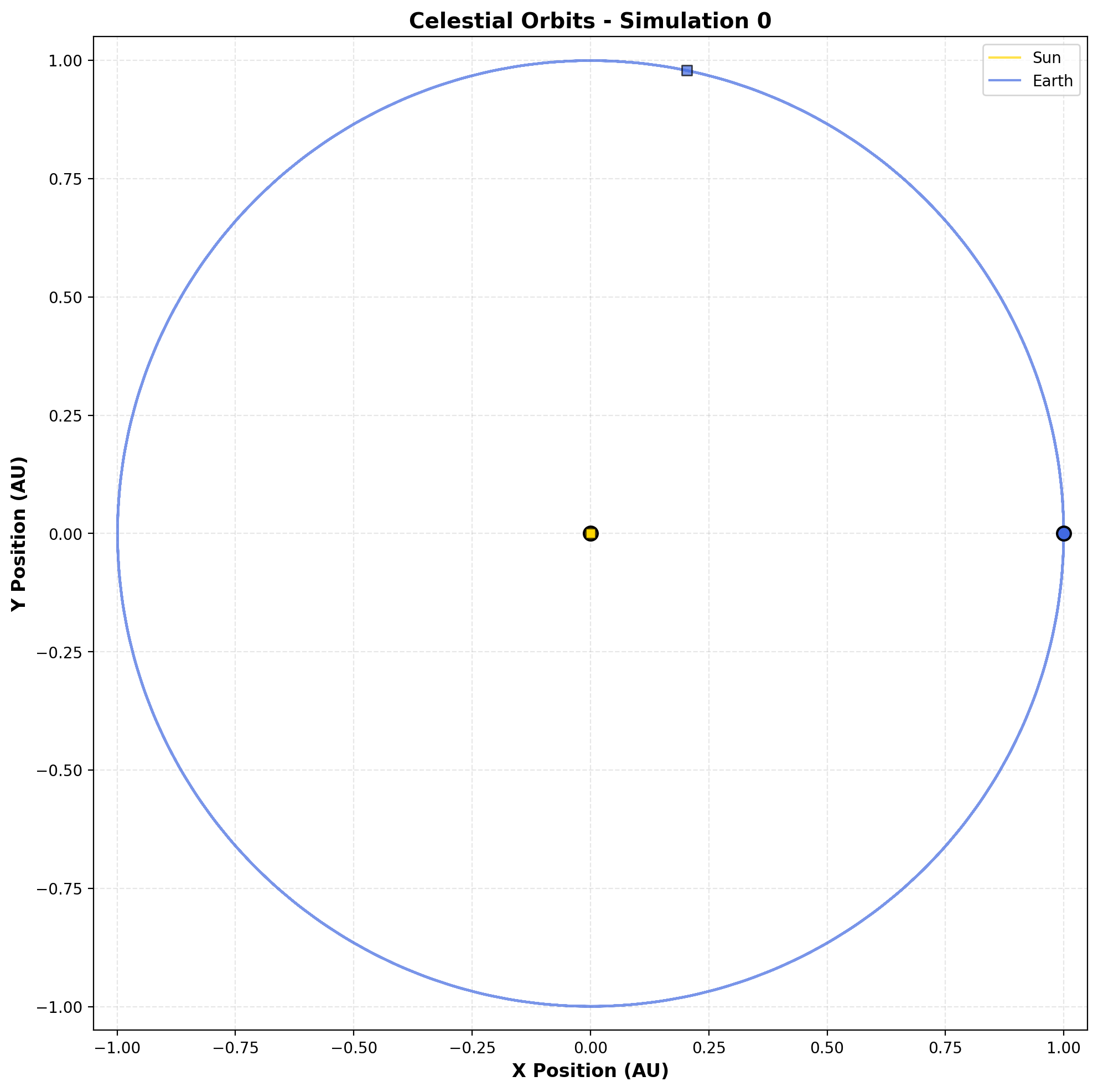
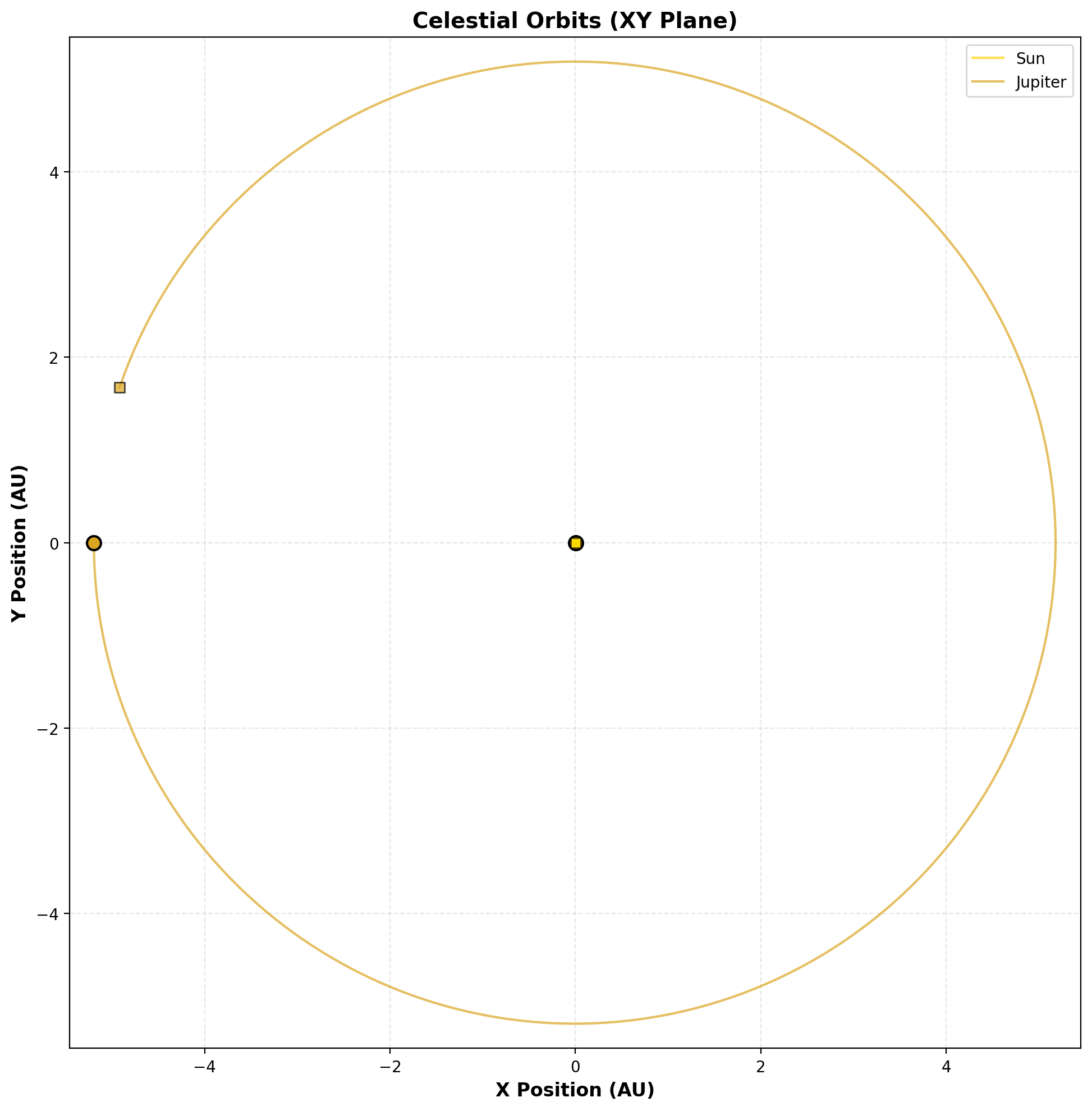
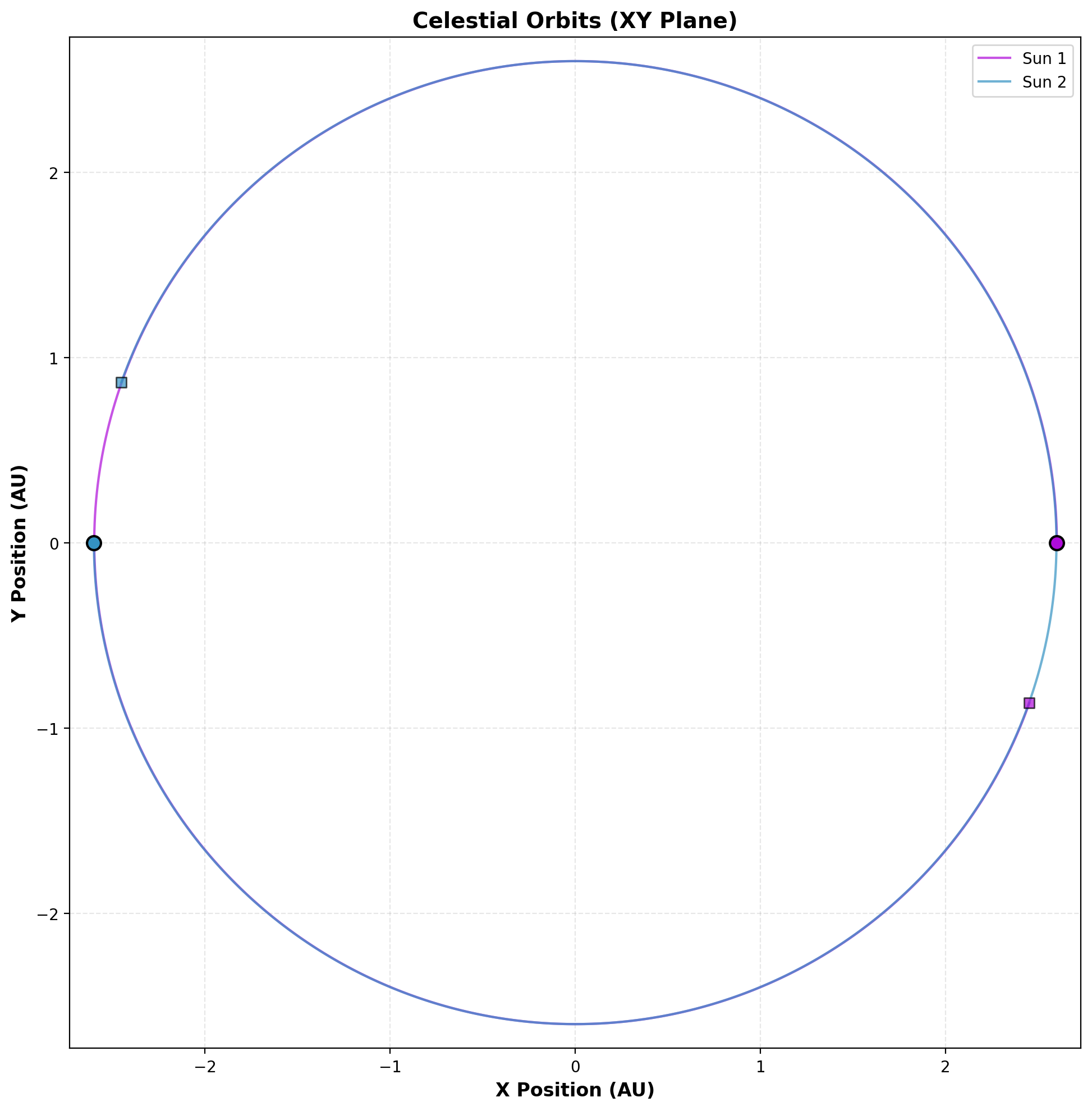
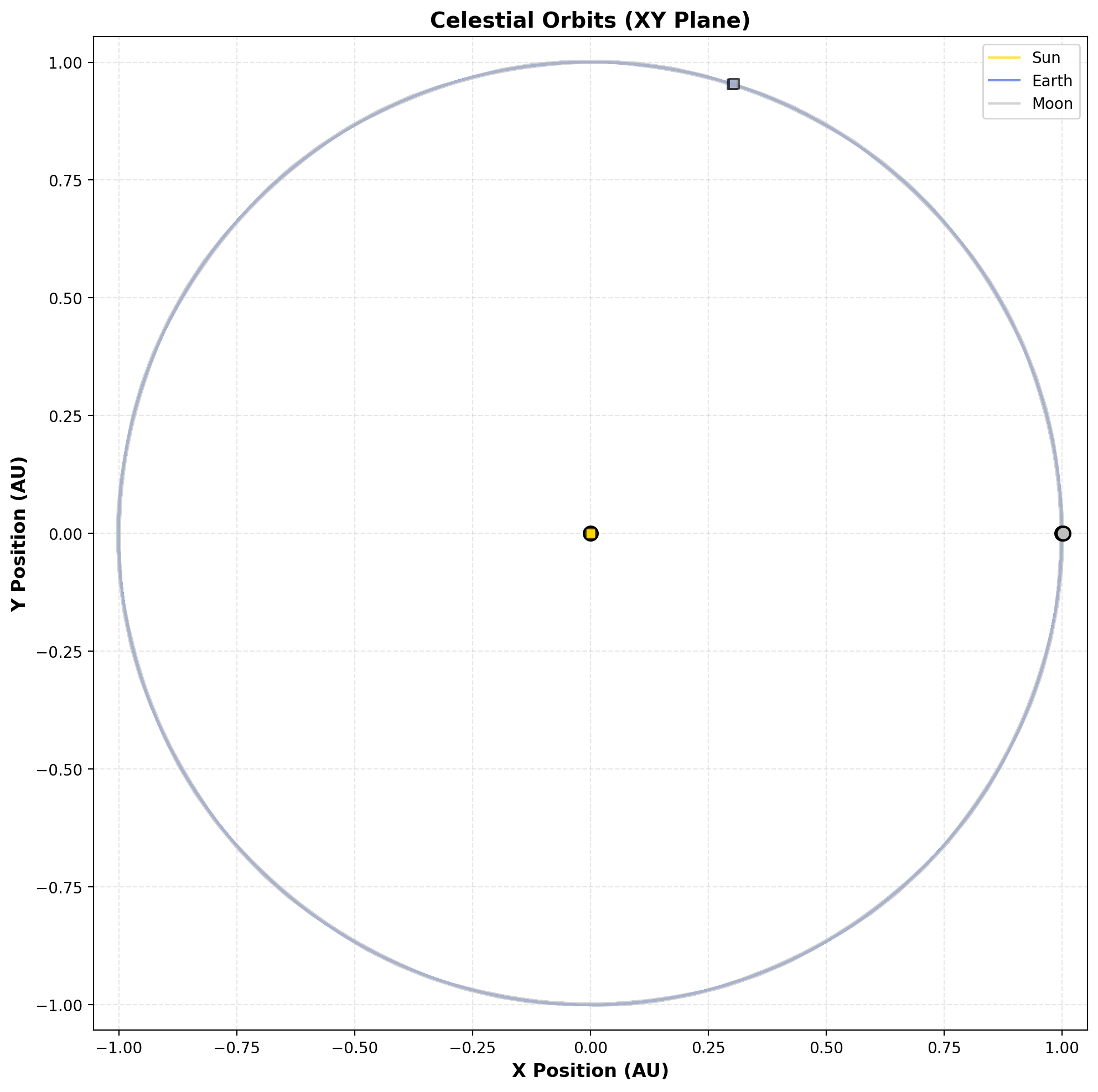
2D projections of N-body orbits. Top: two-body Keplerian orbits (Earth-Sun, Jupiter-Sun). Bottom: three-body interactions revealing gravitational perturbations.
3D Orbit Plots
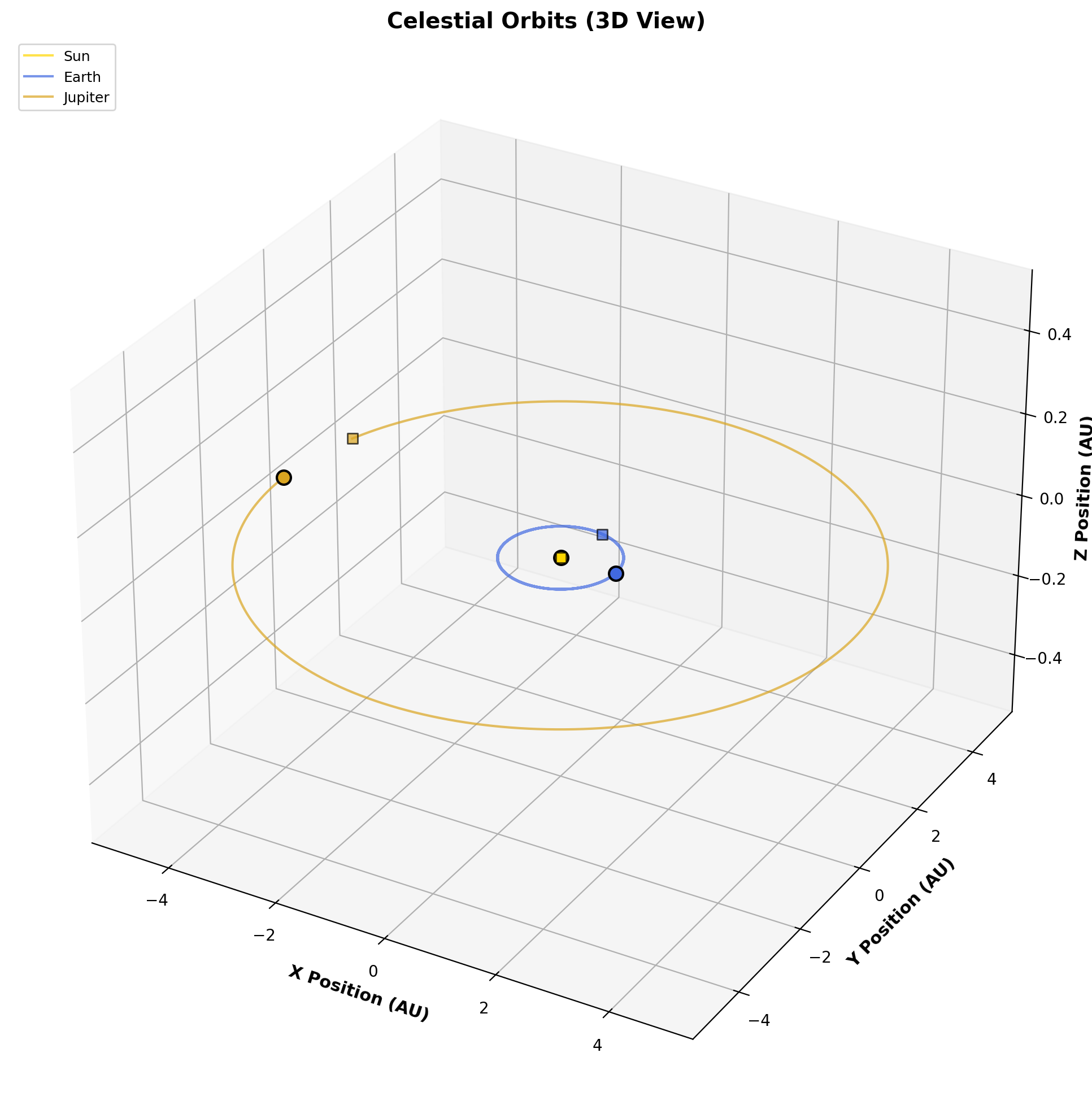
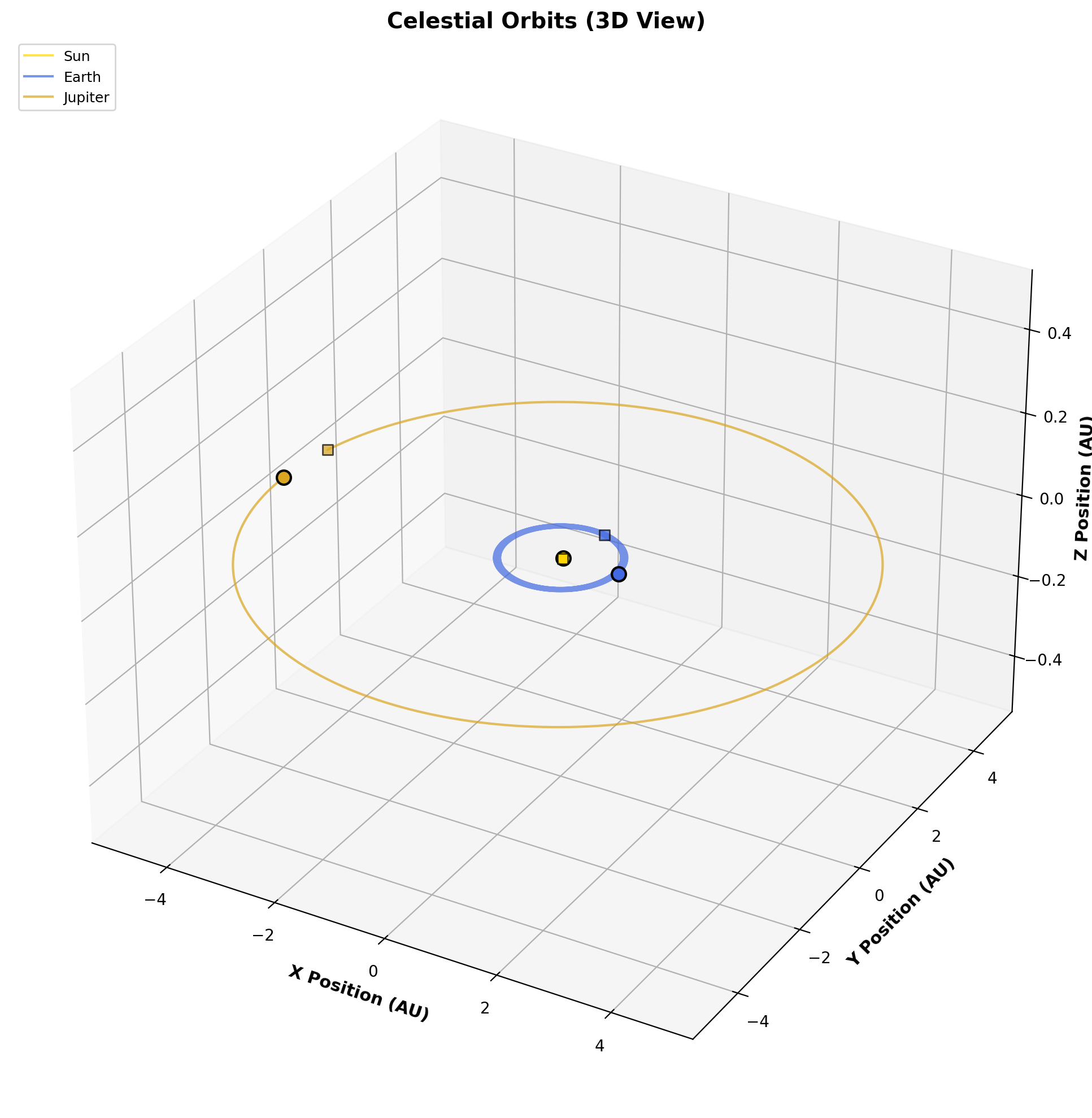
3D orbit visualizations showing orbital inclinations and the true spatial structure of planetary systems.
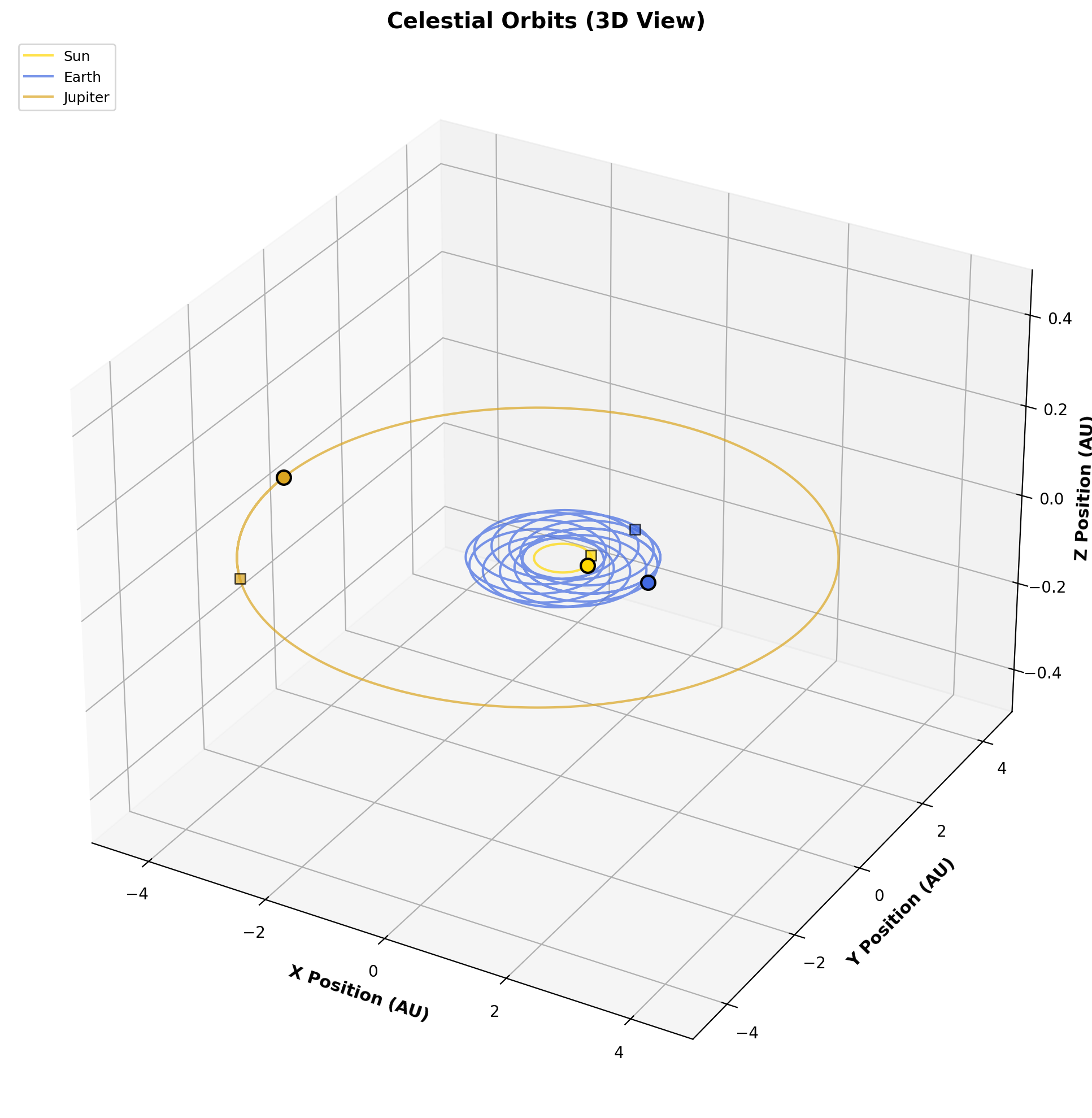
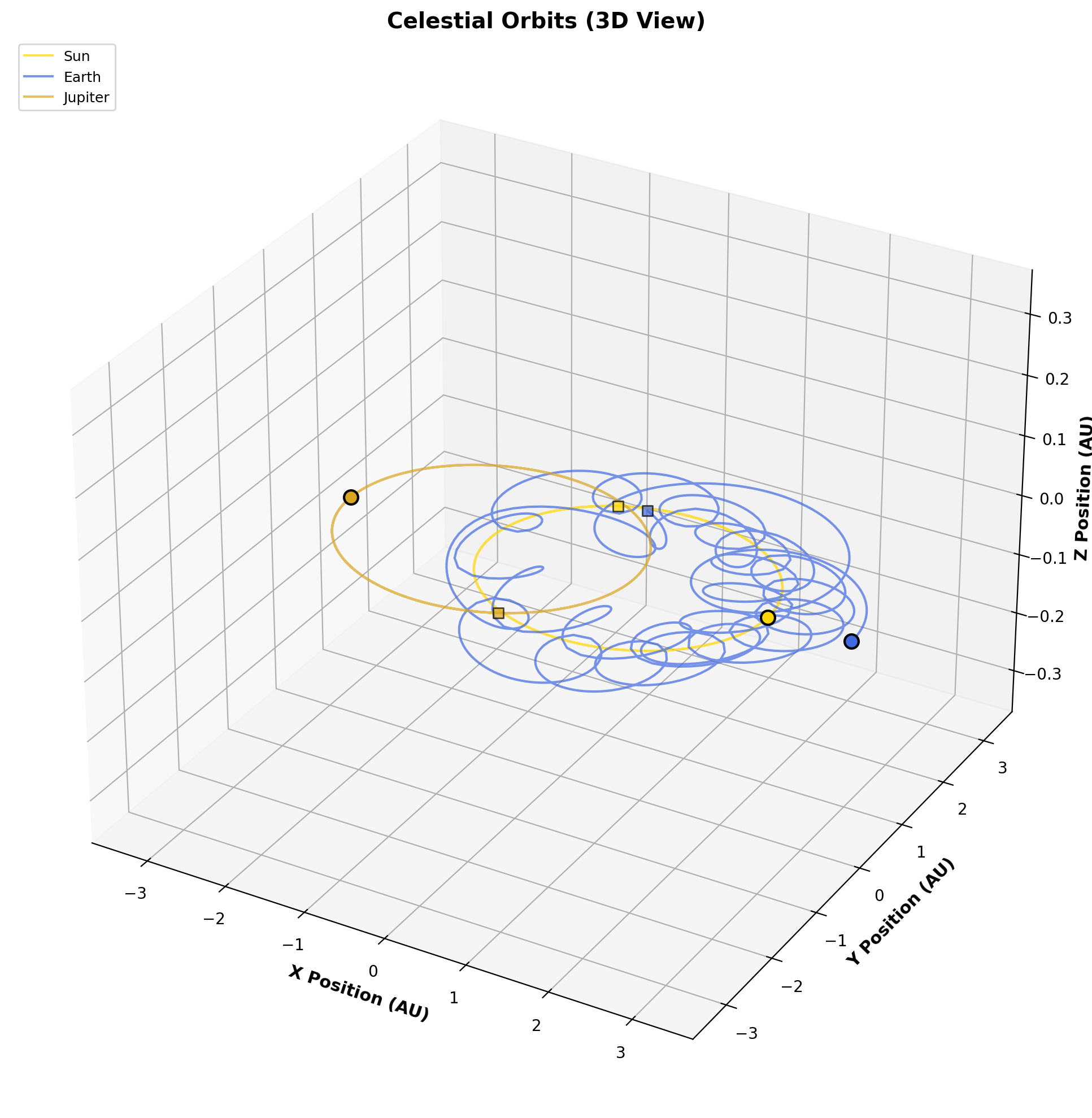
Orbit Animation
3D orbit animation of an N-body gravitational simulation. Planets trace their trajectories over time, illustrating the long-term stability of orbital mechanics under the chosen integrator.
Sources of Error
| Source | Nature | Mitigation |
|---|---|---|
| Integrator truncation | RK4: $\mathcal{O}(h^4)$; Verlet: $\mathcal{O}(h^2)$; Euler-Cromer: $\mathcal{O}(h)$ | Choose integrator based on duration; use smaller $h$ for close encounters |
| Energy drift (RK4) | Non-symplectic RK4 accumulates secular energy error | Use Verlet or Euler-Cromer for long runs; RK4 for short high-accuracy integrations |
| Close encounters | Gravitational singularity as $r \to 0$ produces huge accelerations | Softening parameter at $r < 10^{-10}$ AU returns zero force; adaptive time stepping would be better |
| Two-body approximation | Hardcoded initial conditions assume Keplerian elements at one epoch | Full N-body evolution from accurate initial data; not suitable for billion-year integrations without regularization |
| No relativistic corrections | GR perihelion precession of Mercury is ~43 arcsec/century | Newtonian gravity only; sufficient for most planetary-scale problems |
Computational complexity: $\mathcal{O}(N_\text{bodies}^2 \times N_\text{steps})$ per integration — the gravitational force computation is the dominant cost.
Build & Run
Prerequisites
- C++17 compatible compiler (
clang++org++) - Python 3 with
numpyandmatplotlib(+ffmpegfor animations)
Build
make
Run
./bin/main
Follow the interactive prompts to choose simulation type, integrator, time step, and duration. Results are saved to Output/celestial_output_N.csv with auto-incrementing filenames.
Visualize
# Plot a specific simulation
python3 plotting.py 0
# Plot all output files
python3 plotting.py --all
# Plot a specific CSV file
python3 plotting.py path/to/file.csv
Produces Output/celestial_analysis_N_2d.png, Output/celestial_analysis_N_3d.png, and optionally animated .mp4 files.
Simulation Parameters
Configured interactively at runtime:
| Parameter | Description | Units |
|---|---|---|
| Time step | Integration step $h$ | years |
| Total time | Duration of simulation | years |
| Integrator | RK4 (1), Euler-Cromer (2), or Verlet (3) | — |
| Bodies | Any number of CelestialObject instances |
— |
Recommended Settings
| Simulation | Time Step | Duration | Integrator |
|---|---|---|---|
| Earth-Sun (1 orbit) | 0.0001 yr | 1 yr | RK4 |
| Inner Solar System | 0.001 yr | 10 yr | Verlet |
| Full Solar System | 0.001 yr | 200 yr | Verlet |
| Stability tests (10⁴× Jupiter) | 0.0001 yr | 50 yr | Verlet |
Key Techniques
| Technique | Purpose |
|---|---|
| Three independent integrators (RK4, Euler-Cromer, Verlet) | Compare accuracy vs. energy conservation trade-offs |
| Backward RK4 bootstrap for Verlet | High-accuracy initialization of $\vec{r}_{-1}$ without Taylor expansion |
| Automatic center-of-mass centering | Inertial frame; prevents system drift |
| Template-based integrator design | Generic over state type; reusable across projects |
| Interactive simulation builder | Explore parameter space without recompiling |
| 729-line Python visualization | 2D/3D static plots + animated orbit videos with trail effects |
| Adjustable Jupiter mass | Probe Solar System stability under gravitational perturbations |
Project Structure
Project 3: Celestial Dynamics/
|-- main.cpp # Entry point
|-- include/
| |-- objects.h # CelestialObject, CelestialSystem, force computation
| |-- processing.h # RK4, Euler-Cromer, Verlet integrators (templates)
| `-- run.h # Interactive Run class, Solar System data
|-- plotting.py # 2D/3D orbit plots + animated videos
|-- Makefile # Build configuration
|-- bin/ # Compiled executable
`-- Output/ # CSV trajectories and PNG/MP4 visualizations
|-- celestial_output_N.csv
|-- celestial_analysis_N_2d.png
`-- celestial_analysis_N_3d.png
Nels Buhrley — Computational Physics, 2025